Sürücüsüz Araba Nedir, Nasıl Çalışır?

Sürücüsüz Arabalar Nasıl Çalışır?
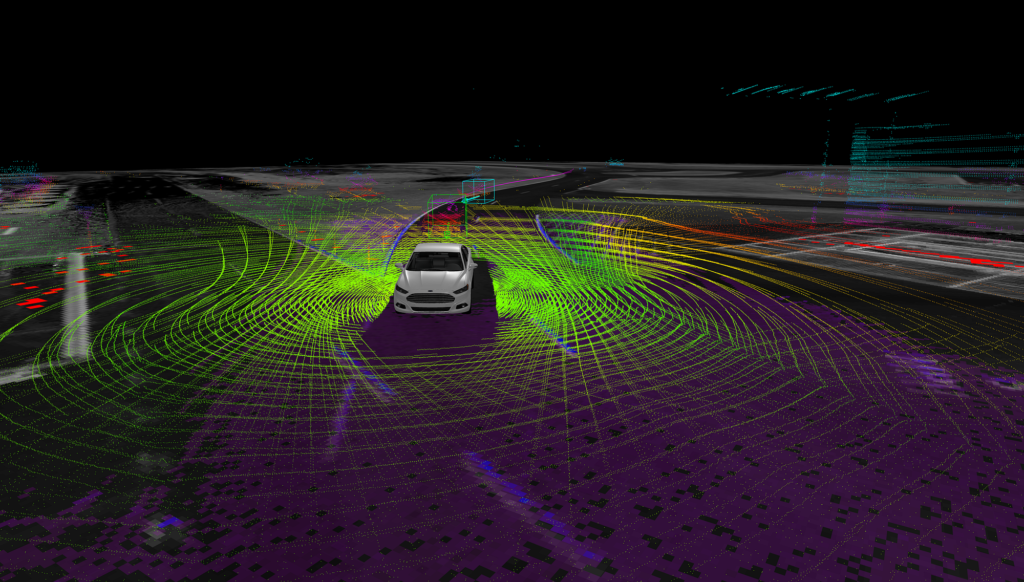
Sürücüsüz araçların temel amacı A noktasından B noktasına güvenli bir şekilde gitmektir. Bunu yapmak için önceden oluşturulmuş bir haritayı çalıştırırlar. Bu haritaya yüksek çözünürlüklü harita veya HD Harita diyoruz. Kendi kendine giden araçlar , kendilerini ve çevredeki araçları HD Haritalarında konumlandırmak için radar, video kameralar, LiDAR ve GPS kombinasyonunu kullanır .
RADAR VE LİDAR
Radar, yakın nesneleri algılamak için radyo dalgalarını kullanan bir sensördür; LiDAR ise daha uzaktaki nesneleri büyük bir hassasiyetle algılamak için ışık dalgalarını kullanır. Bununla birlikte, LiDAR ışık dalgaları kullandığından sise karşı duyarlı olabilirken radar böyle değildir. Ayrıca sürücüsüz araçlar trafik ışıklarını, yol işaretlerini ve yayaları tespit edip takip etmek için video kameralar kullanıyor.
KÜRESEL KONUMLAMA SİSTEMİ
GPS, diğer tüm sensörlerden gelen girdilerle birleştirildiğinde ince ayar yapılabilen aracın rotasını ve kesin coğrafi konumunu (boylam, enlem ve yükseklik) sağlar. GPS sensörleri tünellerde pek iyi çalışmaz, ancak sürücüsüz bir araba bunu diğer sensörlerden gelen girdilerle telafi edebilir.
ULTRASONİK SENSÖRLER
Kendi kendine giden arabalar ayrıca yakın mesafeden nesne tespiti için ultrasonik sensörler kullanır. Ultrasonik sensörler uygun maliyetlidir ve çevresel faktörlerden olumsuz etkilenmezler. Öte yandan düşük çözünürlüğe ve çok yakın menzile sahiptirler. Normalde acil fren yardımı ve kör noktaları kontrol etmek için ultrasonik sensörler kullanırız.
Arabanın tekerleklerine, kapılarına, ön ve arka kısmına daha fazla sensör yerleştirebilsek de, bu sonuçta üreticiye bağlıdır.
Sürücüsüz arabalar, kendilerini bir HD haritada konumlandırmak ve bir varış noktasına doğru bir rota oluşturmak için sensörlerinden gelen tüm girdileri kullanır. HD haritada oluşturulan bir rota, normal bir GPS rotasından çok daha fazla veri içerir. Örneğin otonom bir araç ne zaman şerit değiştirmesi gerektiğini, trafik ışıklarının nerede olması gerektiğini ve hatta yol koşullarını bile biliyor.
HD haritalar çok fazla bilgi içerebildiğinden çok fazla bakıma ihtiyaç duyabilirler. TomTom (Uluslararası), Blickfeld (Almanya), Civil Maps (ABD) ve diğerleri gibi bazı şirketler, özel HD haritaların bakımında ticari değer bulmuşlardır.
Sürücüsüz Arabalar Güvenli Mi?
Uzmanlar, sürücüsüz araçların, insan gücüyle çalışan araçlara göre daha yüksek düzeyde güvenlik sağlayabileceğine inanıyor. Aslında, sürücüsüz arabaların kaza verilerini geleneksel arabalarla analiz edip karşılaştırdığımızda ve bunu “Kullanılan milyon mil başına çarpışma oranına” göre ayarladığımızda, sürücüsüz arabaların kaza oranı her zaman daha düşük olur.
Aşağıdaki şekilde SHRP 2 NDS veri seti ve birden üçe kadar çarpışma seviyeleri kullanılmaktadır; burada birinci seviye, hava yastığının açılmasını ve yaralanmayı içeren en kötü çarpışma türüdür. İkinci seviye çarpışmalarda hava yastığının açılması veya yaralanma olmaz, ancak en az 1.500$ hasar olması gerekir. Üçüncü seviye kazalar, başka bir nesne veya araçla fiziksel çatışmayı içerir, ancak fiziksel hasar birinci veya ikinci seviyeyi karşılamaz.

Ancak bu konuda kamuoyu diğer tarafa düşüyor. Kullanıcılar sürücüsüz araçların mümkün olduğunca mükemmele yakın olmasını bekliyor. Waymo ve Tesla gibi şirketlerin sürücüsüz araçları kazalara karıştığında, otonom araçların hiçbir zaman kazaya karışmamasını istememize rağmen, özellikle de yolu insan sürücülerle paylaştıklarında bunun istatistiksel olarak neredeyse imkansız olduğunu hatırlatırız.
Sürücüsüz Arabanın Bileşenleri
Bir aracı otonom yapan üç temel bileşeni tanımlayabiliriz: yüksek çözünürlüklü bir harita (HD Harita), bir durum ve coğrafi konum tahmincisi ve bir hareket yöneticisi.
1. HD HARİTA (YÜKSEK ÇÖZÜNÜRLÜKLÜ HARİTA)
Sürücüsüz bir otomobilin ihtiyaç duyduğu ilk şey, dünyadaki yerini tespit edebilme yeteneğidir. Bunu başarmak için otonom bir aracın yol ve çevre hakkında bol miktarda veri içeren bir HD haritasına sahip olması gerekiyor.
HD haritalar yanal, boylamsal ve hız kontrolünün yönetimine yardımcı olur; Otonom sürüşün bu üç yönü, aracın hızı düzenlemesinin yanı sıra güvenli bir şekilde şerit değiştirmesine de olanak tanıyor. HD haritalar sayesinde sürücüsüz arabalar, belirlenmiş bir rota boyunca hangi şeritte yer aldıklarını her zaman bilirler; bu, eninde sonunda ihtiyaç duyacakları tüm gerekli şerit değişikliklerini de içerir.
HD haritalarını oluşturmaya ve sürdürmeye çabalayan belirli şirketler var. Bunun iyi bir örneği TomTom HD Haritasını sunan TomTom’dur. TomTom’un tescilli HD Haritası, birkaç santimetreye kadar doğruluk sunar ve sensörlerin çevrelerini anlamalarına yardımcı olur.
2. DURUM VE COĞRAFİ KONUM TAHMİNCİSİ
Durum tahmincileri, otonom araçtaki tüm sensörlerden gelen girdileri koordine eder ve HD harita içindeki aracın coğrafi konumunu güncel tutar. Durum tahmincisi bunu aracın tüm farklı parçalarından girdi alarak ve verileri toplayarak yapar.
Farklı durumlar farklı sensörlerin lehine olabilir. Örneğin, araç bir tünelin içindeyse GPS sinyali güvenilir olmayabilir ve durum tahmincisi, aracın coğrafi konumunu güncellemek için LiDAR, radar ve lastiklerin hareketi gibi diğer sensörlere güvenmek zorunda kalabilir.
Aynı zamanda otoyolda veya otoyolda, aracın önünde bir kamyon LiDAR sensörünün ilerideki yolu algılamasını engelliyor olabilir. Bu durumda sürücüsüz arabamız önünü göremeyecek. Bununla birlikte, güvenilir bir HD harita ve GPS sinyali ile aracımız, önünde ne olduğuna dair (bir sonraki kavşak veya çıkış olup olmadığı) iyi bir fikre sahip olabilir.
Sonuçta bir durum tahmincisi, otonom araçtaki birden fazla sensörden veri alacak ve birleştirecek. Tüm sensörler aynı hızda veri göndermez. Bir LiDAR sistemi milisaniye başına çok sayıda titreşim sağlayabilirken GPS’in güncellenmesi daha uzun sürer. Durum tahmincisi çeşitli girdilerden gelen değerleri birleştirir.
3. HAREKET YÖNETİCİSİ
Hareket planlayıcısı hareketten sorumludur. Dahası, hareket planlayıcı, yapay zekanın aracı önceden belirlenmiş rotaya göre çalıştırdığı yerdir. Eğer sürücüsüz bir arabayı A noktasından B noktasına götürmek istiyorsak ilk seçenek ileri gitmek (ya da geri gitmek ya da dönmek) olabilir. Hareket planlayıcısı, aracın hedefine ulaşması için hangi manevraların gerekli olduğunu belirlemekten sorumludur.
Durum tahmincisi, aracın rotasını engelleyen bir engel olduğunda aracın bunu bilmesine yardımcı olduğu gibi, hareket planlayıcısı da acil durdurma çağrısı yapmaktan sorumludur. Benzer şekilde, aracın şerit değiştirme zamanı geldiğinde hareket planlayıcı şerit değiştirme manevrasını çağırır.

Sürücüsüz Arabaların Faydaları
Kendi kendini süren otomobiller için yüksek düzeyde özerkliğe ulaştığımızda, bu artık zihniyetimizi değiştirme ve bu araçlara güvenmeyi öğrenme meselesi haline gelecektir. Sürücüsüz arabaları benimseyen bir toplum olarak elde edebileceğimiz faydalardan bazıları şunlardır.
KAZA ORANLARININ AZALTILMASI
Otonom araçların en önemli özelliklerinden biri bağlanabilirliktir. Otonom araçların yollarda birbirine bağlanması, araçların yoldaki veya yakındaki kazalardaki sorunları birbirleriyle paylaşabilmesi anlamına geliyor. Bağlantı olmasa bile otonom araçlarla dolu bir yol, yorgun, dikkati dağılmış veya sarhoş sürücülerin olmadığı bir yol anlamına gelir.
YAŞLILAR VE ENGELLİ KİŞİLER İÇİN GELİŞTİRİLMİŞ HAREKETLİLİK
Sürücüsüz araçların norm haline geldiği bir dünya, yaşlıların ve engellilerin ulaşım ve erişilebilirlik açısından daha az sınırlı olacağı anlamına gelecektir. Herhangi bir nedenle araç kullanamayan veya ehliyeti olmayan kişiler, endişelenmeden kendi yiyeceklerini alabilecek veya doktor randevularına gidebilecek.
HİZMET OLARAK SÜRÜCÜSÜZ ARABALAR
Bugün bir arabaya ihtiyacınız varsa, yalnızca arabayı satın almanız veya kiralamanız gerekmez, aynı zamanda bir garaja veya park alanına da ihtiyacınız vardır; arabanızı götürdüğünüz her yere park etmeniz gerektiği gerçeğinden bahsetmeye bile gerek yok. Ayrıca sigortaya ve gaza da ihtiyacınız olacak. Bu masraflar hızla birikir.
Web sunucularında durum böyleydi. Bir web uygulaması veya arka uç hizmeti gerektiren bir iş geliştirmek istiyorsanız, bir sunucuya çok para harcamanız gerekiyordu. Bulut bilişim bize SaaS fikrini getirdi. SaaS ürünleriyle daha az ön ödeme yaparsınız, istediğiniz ana ürünü alırsınız ve şirketin tüm altyapı detaylarıyla ilgilenmesine izin verirsiniz. Yani her gün yalnızca bir saatlik bir sunucu istiyorsanız, her gün yalnızca bir saat için ödeme yaparsınız. Google Cloud Platform ve Amazon Web Services’in arkasındaki iş modeli budur .
Gelecekte otonom araçlara erişim, tıpkı Uber’in ki gibi bir araba talep edebileceğimiz anlamına gelebilir. İşe veya büyük eğlence etkinliklerine araç paylaşımı için otonom filo hizmet ücreti ödediğiniz bir dünya hayal edin. Toplu taşımaya benziyor ancak daha kesin ve (potansiyel olarak) erişilebilir. Bu hizmetlerin fiyatı potansiyel olarak kentsel alanlarda o kadar rekabetçi hale gelebilir ki, araba sahibi olma zorunluluğumuzu ortadan kaldırır ve bunun yerine araba hizmetini yalnızca ihtiyacımız olduğu sürece satın alırız.
Sürücüsüz Arabaların Zorlukları
Maksimum özerklik seviyesine ulaşma konusunda sürücüsüz araçların karşılaştığı iki teknik zorluk vardır: hareket hastalığı ve kaza sorumluluğu.
YOL TUTMASI
Hareket hastalığı, gördüğünüz hareketin iç kulağınızın beklediğinden farklı olması durumunda ortaya çıkar. Bu, hareket halindeki bir araçta kitap okumaya çalışan bazı kişilerin başına gelir. Otonom araçlarda hareket rahatsızlığı olasılığını artıran iki faktör vardır. İlk olarak, aracın nereye ve ne zaman hareket edeceğini tahmin edemiyorsanız, hareket hastalığı geliştirebilirsiniz. İkinci olarak, eğer gözlerinizi hareket alanında tutmazsanız kolaylıkla hareket rahatsızlığına yakalanabilirsiniz.
KAZA SORUMLULUĞU
Sürücüsüz araçlar bağlamında kaza sorumluluğu, sürücüsüz aracın neden olduğu kazadan sorumlu kişiyi ifade eder. En yüksek özerklik seviyesine yaklaştıkça, otonom araçlara yönelik yeni tasarımlar gösterge paneli, direksiyon simidi veya fren pedallarını içermeyecek. Bir araba herhangi bir insan girdisi almazsa kolluk kuvvetleri ve sigorta şirketlerinin sorumluluğu belirlemesi çok daha zor hale gelir. Eyalet ve federal yasa koyucuların, otomobil üreticisi ile otonom aracın yolcuları arasındaki sorumluluğa nasıl karar vereceğimizi belirlemek için müdahil olmaları gerekecek.

Sürücüsüz Arabaların Tarihi
Kendi kendine giden araba fikri, Houdina Radyo Kontrol şirketinin New York’ta radyo kontrollü bir araç sergilediği 1920’lere kadar uzanıyor. 1950’lerde RCA Laboratuvarları ve General Motors, yolların altına kurulan özel devrelerle kontrol edilecek otonom araçlara ilişkin fikirlerini gösterdiler (tramvayların yalnızca rayların yer altında olduğunu düşünün).
Yapay zekadaki ilerlemeler, sürücüsüz arabaların gerçeğe dönüştürülmesinde özellikle önemli oldu. Evrişimli sinir ağları (CNN), geri yayılım (ilk olarak 1989’da pratik olarak uygulandı) ve Max Pooling (ilk olarak 1992’de Cresceptron çerçevesi olarak tanıtıldı) gibi makine öğrenimi teknikleri, modern bilgisayar görüşünün yapı taşları haline geldi.
Bilgisayarlı görme alanındaki en son gelişmeler sayesinde, nesne tespiti ve tanıma için hayati önem taşıyan kameralar, otonom araçlarda önemli sensörler haline geldi.
2004’ten 2007’ye kadar Amerika Birleşik Devletleri Savunma İleri Araştırma Projeleri Ajansı (DARPA) üç zorlukla karşılaştı. Bu mücadelelerde Mojave çölünde 150 mil yol kat edebilen otonom bir araç teslim edebilecek herhangi bir takıma bir milyon dolarlık bir fiyat teklif ettiler. İlk mücadeleyi kimse bitirmedi. İkinci mücadelede parkuru beş araç tamamladı.
2007 yılında Darpa üçüncü ve son mücadelesini kentsel bir ortamda gerçekleştirdi: Victorville, Kaliforniya. Bu mücadelede araçların trafikte ilerlemesi ve birleşme, geçme, park etme gibi bir dizi manevra yapması gerekiyordu. Üçüncü yarışmayı Carnegie Mellon Üniversitesi kazandı. Bu zorluklar ve bunların ödülleri, araştırmacıların ve öğrencilerin sürücüsüz arabalarla ilgili ilk zamanlardaki sorunlar üzerinde çalışmaları için büyük bir teşvikti. Son mücadelede araçların, yoldaki diğer araçlara verdikleri tepkilere dayalı olarak gerçek zamanlı akıllı kararlar vermeleri gerekiyordu.
Günümüzde çoğu otomobil şirketi, park yardımı veya çarpışma tespiti gibi belirli düzeyde özerklik sunuyor. Dahası Waymo ve Tesla gibi şirketler tam özerklik peşinde koşuyor. 2014 yılında Tesla Motors ilk Otopilot özelliğini duyurdu ve 2018’de Waymo, Robotaxi adında otonom bir taksi hizmetini başlattı.
Uber ayrıca yemek dağıtımı ve taksi hizmetleri için sürücüsüz araçlar üretme girişiminde bulundu. Ancak sürücüsüz araç bölümünü 2020’nin sonlarına doğru Silikon Vadisi’ndeki Aurora adlı startup’a sattılar. Uber, sürücüsüz bir araç çıkarmak için Aurora ile ortaklaşa çalışıyor olsa da, aynı zamanda Hyundai ile Aptiv arasında bilinen bir ortak girişimle de anlaşmaya vardı. Motional, Uber’e sürücüsüz bir filo sunmaya daha yakın görünüyor.



